Positions fixe & dynamique
Coastal Monitoring peut fonctionner dans deux modes de positionnement : un mode de position fixe dont la référence est définie manuellement à l'installation, un mode de position dynamique qui est fournie par les équipements (les informations du GPS et du compas permettent de réactualiser le positionnement et l'orientation).
Position fixe
Ce mode est sélectionné par défaut dans TimeZero. Dans ce mode, des positions fixes sont utilisées pour les capteurs et pour la position de référence par défaut. Ce qui signifie que tous les équipements sont installés au sol ou sur une plate-forme fixe et que leurs position et orientation ne varient pas.

Les installations qui vont utiliser le mode de position fixe sont les suivantes :
-
Les plateformes pétrolières (TLP Tension Leg Platform).
-
Les barrages hydrauliques.
-
Les centrales électriques.
-
Les raffineries.
Position dynamique
Dans ce mode, tous les équipements et la position de référence par défaut sont relatifs à un GPS et un compas (pour l'orientation). Cela signifie que lorsque le GPS se déplace, tous les équipements se déplacent dans la même direction par rapport à le position du GPS. Le cap est également utilisé pour régler automatiquement l'orientation des équipements (Radar et Caméra). Les installations qui vont utiliser ce type de positionnement dynamique sont les suivantes :
-
Les petites plateformes pétrolières en mouillage, ancrées sur les fonds marins et qui dérivent
-
Les fermes aquacoles.
-
Les installations mobiles embarquées à bord d'une voiture ou sur une remorque.
Pour permuter le mode de position fixe à position dynamique, cliquez sur le bouton TimeZero et sélectionnez "Ajustements initiaux" dans les options, puis cliquez sur le bouton "Options avancées" et sélectionnez "Autoriser la position et l'orientation Dynamique" :
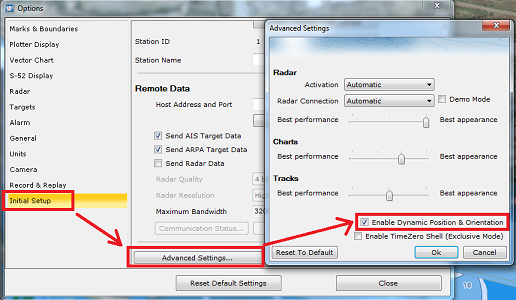
Important : Vous devez redémarrer le logiciel pour valider le changement.
Lorsque le mode de positionnement et d'orientation dynamique est choisi, tous les équipements sont calibrés par rapport au point de référence avec la prise en compte des décalages (compensation latérale et longitudinale).

Toutes les positions des équipements ainsi que la position de référence par défaut sont référencées depuis le haut vers le bas (l'origine étant en haut) et d'un côté à l'autre (origine au centre). Notez que le haut de la plate-forme correspond à la position indiquée par le compas. Vous devez aligner l'observation du Radar et de la caméra dans la même direction que le compas (habituellement une marque sur le compas et le radar indique la direction de la "proue" ou l'avant de l'équipement). Le but est d'aligner l'ensemble des instruments avec le haut de la plate-forme :
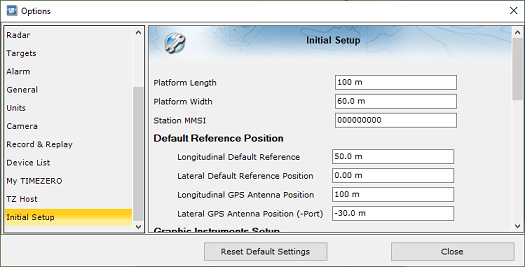
Dans l'illustration ci-dessous, le carré noir représente une plate-forme de 60m de large sur 100m de long. Vous devez dans un premier temps saisir ces dimensions dans les options "Ajustements initiaux" de Coastal Monitoring. Saisir la position relative pour définir la position de référence par défaut. Dans l'exemple ci-dessous, si la position de référence par défaut est située au centre de la plate-forme, elle serait à 50m du haut (les valeurs comprises entre le haut et le bas sont toujours positives) et au milieu (0). Si le GPS est dans le coin inférieur gauche de la plate-forme sa position relative est alors de 100m du haut et -30m du milieu :
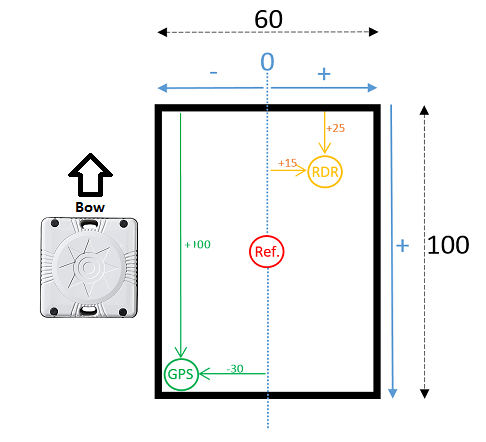
Dans l'exemple ci-dessous, si le radar est situé au milieu de l'angle supérieur droit, ses coordonnées seraient à 25 mètres du haut et à 15 mètres du milieu :
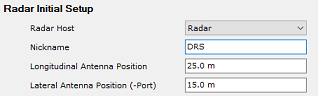
Notez que le radar doit être aligné avec la plateforme (dans la même direction que le compas). Si une petite différence subsiste, utilisez la fonction "Alignement de l'orientation de l'antenne" Radar pour faire correspondre l'écho Radar avec la carte (pour vous aider sélectionnez "Superposition Radar" dans le menu "Radar" du ruban depuis l'espace de travail Monitoring).
Faites de même pour régler l'alignement de la caméra. Utilisez pour cela les réglages du '"Décalage horizontal" (réglage disponible dans les options de "Caméra" de TimeZero pour aligner correctement l'orientation de la caméra sur la carte.
Remarque : Lorsque vous êtes en mode position et orientation dynamique, vous devez connecter et configurer un GPS et un Compas à l'aide de l'assistant de connexion dans TimeZero.