Protocole Pelco-D requis
Pour qu'une caméra Pelco-D soit compatible avec TimeZero, elle doit respecter les exigences ci-dessous :
- La caméra doit supporter une rotation complète sur 360 degrés (Panoramique continu)
- La caméra doit supporter les commandes de vitesse (commandes PTZ "Relatives") et les commandes de position (commandes PTZ "Absolues")
- La caméra doit être capable de fournir un relevé de position (position panoramique, position d'inclinaison, position de zoom), soit en continu (plus de 5 fois par seconde), soit à la demande (chaque fois que TimeZero émet demande de position). Par défaut, TimeZero demande un relevé de position 10 fois par seconde (toutes les 100 ms), mais vous pouvez modifier ce paramètre à la configuration Pelco-D.
- La caméra doit utiliser le système de coordonnées Pelco-D standard pour le panoramique (Pan) et l'inclinaison (Tilt). Voir ci-dessous pour plus d'informations.
Phrase Pelco-D
Pelco-D se compose de 7 octets hexadécimaux :
| Octet 1 | Octet 2 | Octet 2 | Octet 2 | Byte 5 | Byte 6 | Byte 7 |
| Synch Octet | Adresse | Commande 1 | Commande 2 | Donnée 1 | Donnée 2 | Somme de contrôle |
-
Octet 1 - octet de synchronisation, fixé à FF
-
Octet 2 - adresse logique de la caméra contrôlée (l'adresse par défaut est 01, mais elle peut être modifiée à partir des réglages de la "Configuration Pelco")
-
Octet - Commandes 1 et 2
-
Octet 5 (Donnée 1) - vitesse de rotation, échelle de 00 (arrêt) à 3F (vitesse élevée)
-
Octet 6 (Donnée 2) - vitesse d'inclinaison, échelle de 00 (stop) à 3F (vitesse maximale)
-
Octet 7 (somme de contrôle) - somme des octets (excluant l'octet de synchronisation), puis modulo 100 (Code décimal : 256)
Pour que TimeZero puisse contrôler avec succès une caméra Pelco-D, les phrases Pelco-D suivantes doivent être supportées par la caméra. Il est important de comprendre que TimeZero doit pouvoir envoyer des commandes, mais aussi recevoir le relevé de position de la caméra :
Commandes PTZ "relatives" (contrôle de la vitesse) :
| Déplacement à gauche | xFF | Adresse (x01 par défaut) | x00 | x04 | Vitesse (x01-x3F) | x00 | Somme de contrôle |
| Déplacement à droite | xFF | Adresse (x01 par défaut) | x00 | x02 | Vitesse (x01-x3F) | x00 | Somme de contrôle |
| Inclinaison vers le haut | xFF | Adresse (x01 par défaut) | x00 | x08 | x00 | Vitesse (x01-x3F) | Somme de contrôle |
| Inclinaison vers le bas | xFF | Adresse (x01 par défaut) | x00 | x10 | x00 | Vitesse (x01-x3F) | Somme de contrôle |
| Zoomer | xFF | Adresse (x01par défaut) | x00 | x20 | x00 | x00 | Somme de contrôle |
| Dézoomer | xFF | Adresse (x01 par défaut) | x00 | x40 | x00 | x00 | Somme de contrôle |
| Stop | xFF | Adresse (x01 par défaut) | x00 | x00 | x00 | x00 | Somme de contrôle |
Commandes PTZ "absolues" (contrôle de position) :
| Réglage position du déplacement | xFF | Adresse (x01 par défaut) | x00 | x4B | MSB de la Position du déplacement | LSB de la Position du déplacement | Somme de contrôle |
| Réglage position de l'inclinaison | xFF | Adresse (x01 par défaut) | x00 | x4D | MSB de la Position d'inclinaison | LSB de la Position d'inclinaison | Somme de contrôle |
| Réglage de la position du zoom | xFF | Adresse (x01 par défaut) | x00 | x4F | MSB de la Position du Zoom | LSB de la Position du Zoom | Somme de contrôle |
Commandes de "Demande de position" :
| Demande de la position du déplacement | xFF | Adresse (x01 par défaut) | x00 | x51 | x00 | x01 | Somme de contrôle |
| Demande de la position de l'inclinaison | xFF | Adresse (x01 par défaut) | x00 | x53 | x00 | x01 | Somme de contrôle |
| Demande de la position du zoom | xFF | Adresse (x01 par défaut) | x00 | x55 | x00 | x01 | Somme de contrôle |
Réponse (de la Caméra à TimeZero) :
| Réponse de la position du déplacement | xFF | Adresse (x01 par défaut) | x00 | x59 | x00 | x01 | Somme de contrôle |
| Réponse de la position d'inclinaison | xFF | Adresse (x01 par défaut) | x00 | x5B | x00 | x01 | Somme de contrôle |
| Réponse de la Position | xFF | Adresse (x01 par défaut) | x00 | x5D | x00 | x01 | Somme de contrôle |
Commandes du Focus :
| Focus éloigné | xFF | Adresse (x01 par défaut) | x00 | x80 | x00 | x00 | Somme de contrôle |
| Focus rapproché | xFF | Adresse (x01 par défaut) | x01 | x00 | x00 | x00 | Somme de contrôle |
Système de coordonnées et résolution des angles
La caméra Pelco-D doit utiliser le système de coordonnées standard Pelco-D ci-dessous avec une résolution angulaire de 0,01 degré.
Panoramique (Pan) :
La caméra doit pouvoir pivoter complètement sur 360 degrés. La valeur de panoramique (utilisée pour définir et interroger la position) doit commencer à 0 et aller jusqu'à 35999 :
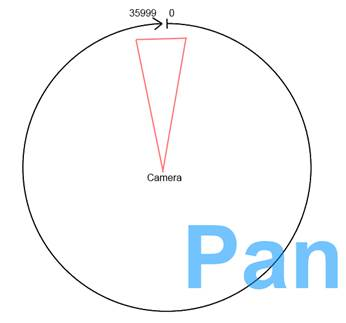
Par exemple, pour faire pivoter la caméra de 90 degrés, utilisez la valeur Pelco-D 9000.
Inclinaison (Tilt) :
La valeur d'inclinaison (utilisée pour définir et interroger la position) doit suivre le système de coordonnées ci-dessous :
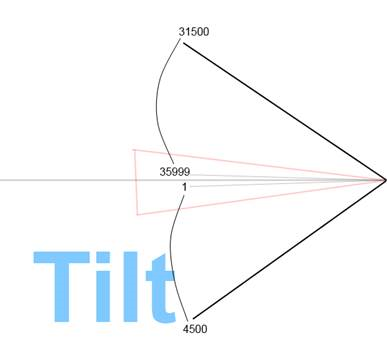
La valeur 0 est utilisée pour l'angle horizontal d'origine. L'envoi d'une valeur positive (avec une résolution d'angle de 0,01 deg) doit incliner la caméra vers le bas. Par exemple, si TimeZero envoie la valeur Pelco-D 4500, la caméra doit s'incliner vers le bas à 45 degrés. Pour l'inclinaison vers le haut, les valeurs doivent commencer à 35999 et diminuer jusqu'à : (angle maximal d'inclinaison vers le haut * 100) - 36000. Par exemple, pour une inclinaison vers le haut de 45 degrés, la valeur Pelco-D de 31500 doit être utilisée. Notez que l'angle maximal d'inclinaison vers le haut et l'angle maximal d'inclinaison vers le bas utilisés dans cet exemple (31500 et 4500 respectivement) sont arbitraires. La caméra peut prendre en charge différents angles d'inclinaison vers le haut et vers le bas.