Réalité augmentée
Pour activer les différentes fonctions de la réalité augmentée, cliquez sur le menu "Réalité Augmentée" du ruban (lorsque la caméra a été configurée pour la réalité augmentée) :
Remarque : La réalité augmentée est disponible avec une caméra fixe ou PTZ. Bien qu'elle ne fonctionne qu'avec les données de position et de cap, il est fortement recommandé de connecter un compas satellite Furuno (comme le SC30, SC33 ou SCX20) afin de pouvoir appliquée une compensation avec les données de tangage et de roulis. Vous pouvez vous référer aux instructions de configuration ci-dessous.
Calques de la réalité augmentée
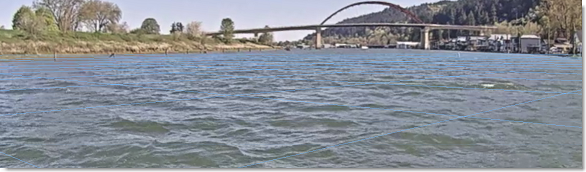
Grille
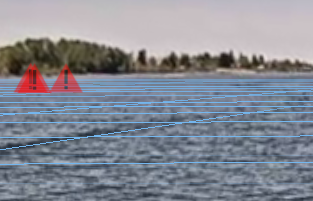
Vous pouvez afficher en superposition une fine grille bleue sur la vidéo.
Info des cibles
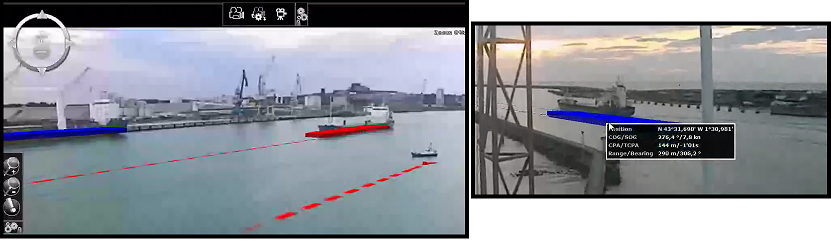
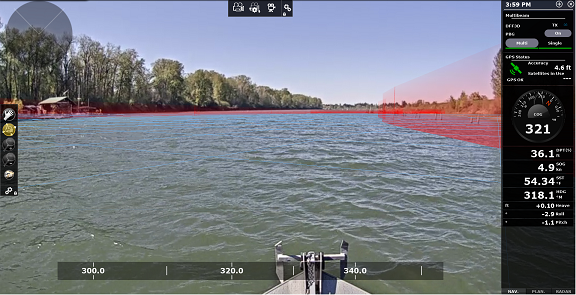
Vous pouvez sélectionner "Info des cibles" pour obtenir des informations sur les cibles ARPA ou AIS directement dans le flux vidéo de la caméra. Elle affiche la direction relative de la cible, son ID (dans le cas d'ARPA) ou son nom (dans le cas d'AIS) et sa vitesse :

Icône AIS
Permet d'afficher les icônes AIS en taille réelle (si la cible AIS transmet sa taille) directement sur la vidéo :
Route active et lignes d'écart de route (XTE)
Si vous activez une route, TIMEZERO peut afficher la route (en violet), le waypoint actif (avec les informations de distance et de relèvement) et les lignes d'alarme XTE représentées par les lignes rouge et verte de l'écart de route :
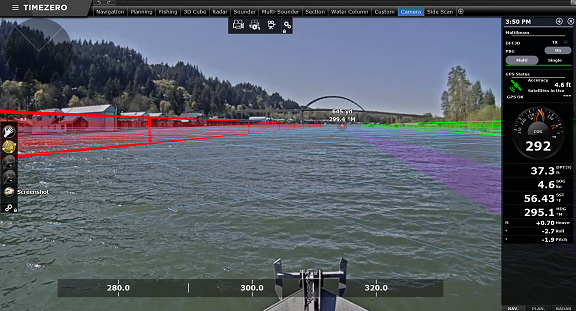
Conseil : La hauteur des lignes de l'écart de route pour l'alarme XTE peut être ajustée en sélectionnant la dernière option "Paramètres avancés et étalonnage" dans le menu "Réalité augmentée" du ruban.
Zone de profondeur en dessous de la valeur de sécurité
Les informations de la zone de profondeur de la carte vectorielle peuvent être utilisées et affichées dans le flux de la caméra comme un mur virtuel :
Dangers d'échouage
Lorsque le cône anti-échouage est activé (reportez-vous au chapitre sur le "Cône Anti-échouage" pour plus d'informations), le danger isolé est également affiché sur la vidéo de la caméra.
Echelle d'azimut, échelle de distance ou échelle verticale (tangage)
Vous pouvez activer ou désactiver différentes échelles en bas (pour échelle d'azimut) et à droite (pour l'échelle de tangage ou de distance) de votre écran. Notez que vous ne pouvez pas afficher les échelles de tangage et de distance en même temps.
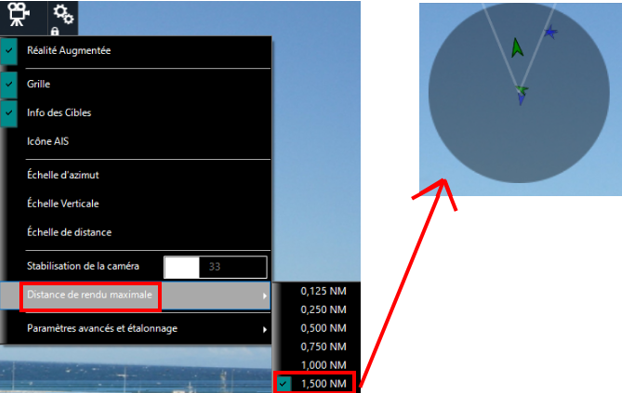
Echelle de rendu
Les objets qui sont affichés dans l'espace de travail Caméra sont filtrés en fonction de leur échelle. Vous pouvez définir la distance à laquelle TIMEZERO doit rendre les objets en ajustant le paramètre "Distance de rendu maximale". Notez que cette échelle est également utilisée par le panneau de prévisualisation du champ de vision dans le coin supérieur gauche de l'écran :
Stabilisation
Lorsqu'un capteur de tangage et de roulis tel que Furuno SC30, SC33 ou SCX20 est connecté à l'ordinateur et configuré dans l'assistant de connexion, TIMEZERO utilise les informations fournies par le capteur pour stabiliser les objets (grille, étiquette cible, ...) dans l'espace de travail de la Caméra.
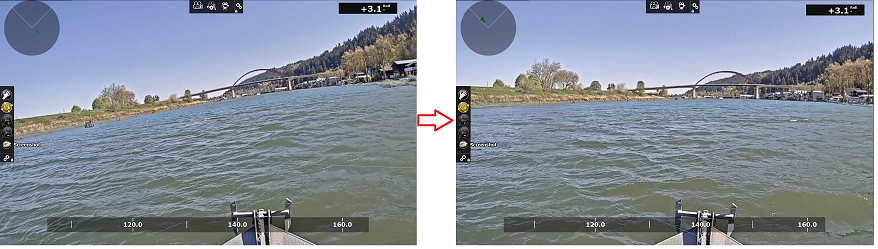
TIMEZERO affiche également un horizon parfaitement plat sur votre écran (en utilisant les données de roulis pour faire pivoter l'image de la caméra). Le paramètre "Horizon plat" est activé par défaut dans les "Paramètres avancés et étalonnage" du menu "Réalité augmentée" du ruban :
TIMEZERO peut effectuer une stabilisation numérique de l'ensemble de l'image de la caméra et ainsi "modérer" les changements brusques. Vous pouvez ajuster le facteur de stabilisation en déplaçant le curseur de la barre de réglage "Stabilisation de la caméra" qui se trouve dans le menu "Réalité Augmentée" du ruban.
Réglage de la réalité augmentée
Au minimum, le GPS et le cap doivent être configurés, mais il est fortement recommandé de connecter un compas satellite Furuno via NMEA2000 (en utilisant l'Actisense NGT-1 USB). Un compas satellite Furuno peut non seulement fournir une position et un cap très précis, mais aussi envoyer des données de tangage et de roulis à TIMEZERO. Lorsque les données de tangage et de roulis sont configurées dans l'assistant de connexion, TIMEZERO les utilise automatiquement pour la stabilisation.
Configuration de la caméra
Assurez-vous que vous avez sélectionné "Activer la réalité augmentée" lors de la configuration de la caméra. Avec une caméra H264 générique ou une caméra Axis, il est très important de saisir le champ de vision horizontal de la caméra dans le champ "FOV" des options "Caméra". Lors de la configuration d'une caméra PTZ, vous devez saisir le FOV maximum (lorsque le zoom est entièrement déployé) et le FOV minimum (lorsque le zoom est entièrement rétracté). Vous trouverez ces informations dans la documentation de la caméra.
Remarque : Il n'est pas nécessaire de saisir un FOV pour la caméra FLIR car il est configuré automatiquement.
Assurez-vous également de sélectionner "Afficher sur la carte" lorsque vous configurez une caméra fixe ou "Afficher sur la carte et utiliser pour le suivi" pour une caméra PTZ afin que la fonction de réalité augmentée soit activée pour cette caméra.
Réglages initiaux (étalonnage)
Un bon étalonnage est très important pour afficher correctement et précisément les différents calques de la réalité augmentée. Pour calibrer la caméra, sélectionnez l'espace de travail Caméra, cliquez sur le bouton "Réalité augmentée", sélectionnez "Paramètres avancés et étalonnage", puis "Calibrer la caméra...".
Lors du calibrage de la caméra, un cap et des lignes de référence de l'horizon s'affichent et la fenêtre suivante apparaît :
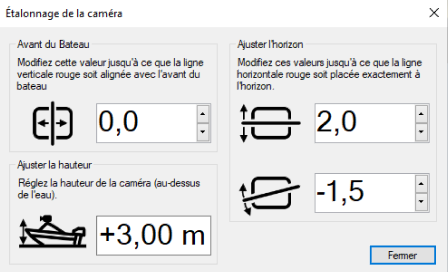
Remarque : Si vous calibrez une caméra PTZ, la caméra se déplace automatiquement vers l'avant lorsque la fenêtre est ouverte afin que vous puissiez l'aligner avec la proue du bateau. N'effectuez PAS de panoramique/inclinaison manuelle de la caméra lorsque vous effectuez l'étalonnage.
Tout d'abord, réglez la hauteur de la caméra (sa hauteur au-dessus de l'eau), puis utilisez les commandes de décalage de la ligne de cap (direction avant), de l'horizon et de la rotation pour calibrer la caméra. Pour ajuster la direction avant, le mieux est d'aligner la ligne de référence verticale avec la proue de votre bateau (si elle est visible). Si elle n'est pas visible, vous pouvez utiliser une cible AIS et vous assurer que l'étiquette "Info de la cible" est alignée verticalement avec le bateau que vous visualisez dans la caméra. Pour définir le décalage horizontal et rotatif, il est préférable que l'horizon soit visible à l'écran. Utilisez ensuite les deux commandes pour faire correspondre la ligne de référence de l'horizon à l'horizon vu par la caméra.
Délai du capteur
Certaines caméras peuvent prendre plus de temps que d'autres pour traiter les données (coder et transférer la vidéo sur le réseau). De plus, selon le processeur de votre ordinateur, le décodage du flux vidéo de la caméra peut également ajouter un certain délai au processus global. Afin de mieux "synchroniser" les données du capteur (cap / tangage / roulis) avec le flux vidéo, il est possible d'introduire un décalage dans les données de cap et de tangage / roulis en réglant le "Délai Cap" et le "Délai tangage et roulis" disponibles dans l'option de réglage "Paramètres avancés et étalonnage".