Connexion du pilote automatique (NMEA0183)
Configuration
Lorsqu'une route est activée, TZ iBoat peut envoyer des données au pilote automatique via une passerelle Wi-Fi NMEA en utilisant une connexion TCP. Bien que TZ iBoat ne prenne en charge que le protocole NMEA0183, si votre pilote automatique est connecté via NMEA2000, la plupart des passerelles Wi-Fi vers NMEA2000 prennent en charge la traduction des phrases NMEA0183 (envoyées par TZ iBoat) en PNGs NMEA2000.
Notez que la sortie de données de TZ iBoat n'est prise en charge qu'avec une connexion TCP (UDP ne peut être utilisé que pour recevoir des données). Assurez-vous que votre passerelle Wi-Fi NMEA prend en charge une connexion TCP bidirectionnelle afin que TZ iBoat puisse transmettre et recevoir des données.
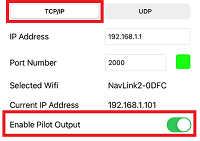
Pour activer la sortie du pilote automatique, appuyez sur le bouton TZ et sélectionnez "Réglages" puis "Installation", assurez-vous de sélectionner le protocole TCP dans la fenêtre de configuration de la passerelle NMEA et appuyez ensuite sur "Activer la sortie du pilote" :
Pour plus d'informations sur la configuration de la passerelle NMEA dans TZ iBoat, reportez-vous au chapitre des "Instruments externes (NMEA0183)".
Par défaut, TZ iBoat émet les phrases NMEA0183 suivantes lorsqu'une route est activée : $IIAAM (à chaque fois qu'un waypoint est passé), $IIRMB (une fois par seconde) et $IIXTE (une fois par seconde). Ces 3 phrases devraient satisfaire la plupart des configurations de pilotes, mais si vous souhaitez ajouter ou supprimer des phrases NMEA0183, vous pouvez simplement sélectionner "Configuration du pilote" dans les réglages "Installation" :
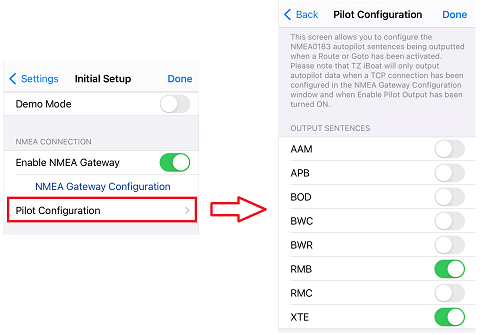
IMPORTANT : Si vous utilisez un Actisense W2K-1 pour traduire des phrases NMEA0183 en PNGs NMEA2000, nous vous recommandons d'ajouter la phrase "BWR" à la configuration de sortie.
Remarque : TZ iBoat enverra une phrase de "confirmation" toutes les 5 secondes. Cette phrase est ignorée par le pilote automatique et est envoyée par TZ iBoat uniquement pour tester et maintenir la connexion TCP.
Utilisation du pilote automatique
Une fois la configuration terminée, vous n'avez qu'à activer une route ou un "Goto" dans TZ iBoat, puis activer le mode "NAV" de votre pilote automatique. Le pilote automatique recevra les données de navigation et dirigera votre bateau vers le waypoint actif. Notez que lorsqu'une route est activée, TZ iBoat est conçu pour continuer à fonctionner en arrière-plan, mais pour assurer un traitement correct des données envoyées au pilote, il est préférable de garder l'application fonctionner au premier plan en activant l'option "Pas de verrouillage automatique" dans "Réglages" puis "Général". Cela empêchera l'appareil de se mettre automatiquement en mode veille et permettra à TZ iBoat de fonctionner en continu.
Remarque : TZ iBoat passe automatiquement en "mode faible consommation" après 30 secondes d'inactivité et réduit la fréquence de rafraichissement pour économiser la consommation d'énergie. Mais, si votre appareil est monté, il est recommandé de le connecter à une source électrique.
Résolution de problèmes
Problème de connexion (le mode "Navigation" ne s'enclenche pas sur le pilote automatique)
Vérifiez le câblage entre le pilote automatique et la passerelle NMEA.
Assurez-vous que votre passerelle Wi-Fi est correctement câblée à votre pilote automatique (surtout si vous utilisez une connexion série NMEA0183).
Vérifiez votre connexion TCP.
Assurez-vous que TZ iBoat peut établir une connexion TCP avec la passerelle NMEA. Assurez-vous que votre appareil est connecté au réseau Wi-Fi de la passerelle NMEA et que l'indicateur vert est présent à côté du numéro de port est vert.
Vérifiez la configuration des phrases NMEA0183 en sortie
La configuration par défaut (AAM, RMB et XTE) devrait fonctionner avec la plupart des passerelles NMEA. Toutefois, certaines passerelles peuvent nécessiter une phrase supplémentaire pour être activées.
Testez la connexion
Dans le panneau NavData de TZ iBoat ajoutez CTS (Course to Steer), XTE (Cross Track Error), et éventuellement DTW (distance jusqu'au waypoint). Configurez le pilote pour qu'il affiche une "feuille de pilotage" ou une feuille de service avec les mêmes informations. Notez que le "CTS" peut être référencé comme "Relèvement", "BPW" (position de relèvement vers le waypoint) ou "BRG" sur le pilote. Le "DTW" peut être référencé comme "RNG", "Range" ou "DIST".
Une fois que vous avez configuré le panneau NavData dans TZ iBoat et que vous pouvez également afficher ces informations sur le pilote, activez une route ou un Goto dans TZ iBoat. Regardez l'écran du pilote automatique et vérifiez que les données correspondent à celles affichées dans TZ iBoat. Une fois que vous avez confirmé que les données correspondent dans TZ iBoat et sur le pilote automatique (au moins XTE et CTS), vous pouvez effectuer un essai en mer.
Le pilote ne dirige pas correctement
Vérifiez le comportement du pilote en "mode automatique".
Chaque pilote dispose d'un mode "Auto" qui ne s'appuie sur aucune information de navigation externe (contrairement au mode "Nav" qui s'appuie sur l'erreur de trajectoire et le relèvement vers un waypoint envoyés par un "Navigateur" tel que TZ iBoat). Tester le pilote en mode "Auto" vous permet de valider son comportement correct en mode autonome. En mode "Auto", le pilote prend simplement un instantané du cap au moment où l'utilisateur appuie sur le bouton "Auto" et maintient simplement ce cap. Si le pilote n'est pas capable de naviguer en ligne droite en mode "Auto", il ne sera pas non plus capable de naviguer en ligne droite en mode "Nav". Dans ce cas, ajustez les réglages du pilote jusqu'à ce qu'il se comporte de manière satisfaisante en mode "Auto".
Vérifiez le capteur de cap
Si le pilote se comporte correctement en mode "Auto", mais a du mal à suivre un cap en mode "Nav", le problème vient probablement du capteur de cap. Comprenez que lorsque TZ iBoat envoie un relèvement au pilote via la phrase "CTS" (par exemple, "Aller à 273 degrés"), le pilote ne peut compter que sur son propre cap pour savoir où se trouve 273 degrés. Si le capteur de cap n'est pas correctement calibré et envoie une valeur incorrecte, alors TZ iBoat et le pilote ne seront pas d'accord sur la position des 273 degrés, ce qui entraînera un comportement erratique (le pilote semblera suivre un cap différent).
Pour dépanner un capteur de cap et vous assurer qu'il est correctement calibré, vous pouvez comparer la valeur COG (Course Over Ground) envoyée par le GPS à la valeur HDG (cap) envoyée par le capteur de cap. Le plus simple est de configurer les données de cap dans TZ iBoat pour afficher les données de COG et de cap l'une à côté de l'autre, mais si cela n'est pas pratique (et que vous pouvez afficher la valeur de cap directement sur l'écran de votre pilote), vous pouvez comparer manuellement le COG affiché dans TZ iBoat et la valeur de cap affichée sur le pilote. Effectuez cette comparaison par temps calme (vent faible, pas de courant, pas de vague), et dirigez votre bateau sur une trajectoire rectiligne à 6-10Kn. Dans ces conditions, la direction dans laquelle vous allez (COG) doit correspondre à la direction vers laquelle pointe votre bateau (HDG). En d'autres termes, les valeurs de cap et de COG affichées dans TZ iBoat et sur le Pilot doivent être identiques (+/- 1 degré). Répétez ce processus dans différentes directions (cap Nord, cap Sud, cap Est et cap Ouest). Si les valeurs de cap et de COG ne correspondent pas (plus de 2-3 degrés d'écart), le capteur de cap doit être étalonné.
Le pilote ne gère pas correctement le changement de waypoint
Si le pilote "oublie" un waypoint, veillez à définir un Rayon de changement de waypoint suffisamment grand dans TZ iBoat pour permettre au pilote de commencer le virage avant d'atteindre réellement le waypoint. Le Rayon de Changement de Waypoint peut être ajusté à partir des "Réglages" puis "Routes".
Assurez-vous également que le gain "Counter Rudder" (réglage "contre barre" du pilote) est réglé correctement pour votre bateau. Ce réglage varie en fonction de l'"inertie" de votre bateau. Certains pilotes (comme les pilotes Furuno) apprennent ce réglage de manière dynamique et s'améliorent après quelques navigations. Vous trouverez ces informations dans la documentation du fabricant du pilote.
Résumé
Voici ce qu'il faut garder à l'esprit lors de la configuration d'un pilote avec TZ iBoat :
- Assurez-vous que le pilote automatique est correctement connecté à la passerelle NMEA.
- Assurez-vous que TZ iBoat est connecté au réseau Wi-Fi de la passerelle sans fil.
- Sélectionnez les phrases NMEA0183 correctes en sortie (dans la plupart des cas, AAM, RMB et XTE fonctionneront, mais vous pouvez essayer d'ajouter APB et BWR si vous avez des problèmes).
- Activez une route et assurez-vous que les valeurs XTE et CTS correspondent sur TZ iBoat et sur le pilote automatique (affichez ces deux informations sur le pilote automatique et comparez avec les informations affichées dans la barre de route sur TZ iBoat).
- Assurez-vous que le capteur de cap est correctement calibré. N'oubliez pas qu'un capteur de cap décalé de 3 degrés ou plus entraînera le pilote automatique à diriger le bateau avec la même erreur.