Ajustements initiaux
-
Longueur du bateau : Saisissez la longueur de votre bateau.
-
Largeur du bateau : Saisissez la largeur de votre bateau.
-
Bateau MMSI : Saisissez le matricule de votre bateau (identifiant).
-
Nom du bateau : Saisissez le nom du bateau. Ce champ est automatiquement renseigné lorsqu'il est connecté à un émetteur AIS.
-
Numéro d'immatriculation du bateau : Saisissez le numéro d'immatriculation du bateau.
-
Type du bateau : choisir la représentation symbolique par rapport à un type de bateau (voilier ou bateau à moteur plaisance ou Sport Fishing ou commercial).
-
Taille de l'icône statique : Choisir la taille de l'icône sur la carte (Normal ou petite)
-
Couleur de l'icône de jour du bateau : (rouge par défaut) vous pouvez changer la couleur en mode jour du bateau ainsi que celle du vecteur de direction COG.
-
Couleur de l'icône de nuit du bateau : (rouge par défaut) vous pouvez changer la couleur en mode nuit du bateau ainsi que celle du vecteur de direction COG.
-
Affichage de la profondeur : permet à l'utilisateur de choisir le point de référence des mesures de profondeurs soit par rapport à la surface de l'eau (choisir "Par rapport à la surface") ou par rapport à la position de la quille (choisir "Sous la quille"). Par exemple si la mesure de profondeur est à 100m en dessous du niveau de la mer et que la valeur d'immersion de la quille est fixée à 8m. Lorsque vous basculer l'option d'affichage de la profondeur de l'option "Sous le niveau de la mer" à "Sous la quille", l'échelle du cadran de mesure des profondeurs est simultanément modifiée et la valeur de profondeur affichée est rafraîchie et passe à 92m au lieu de 100m. Attention si les deux valeurs de profondeur sous la quille et sous le niveau de l'eau sont présentes dans la sentence NMEA, alors la valeur DPT range va intégrer cette différence.
-
Source du décalage de la sonde : lorsqu'il est réglé sur "automatique", TIMEZERO utilise le décalage envoyé par les instruments et retourne le décalage défini ci-dessous s'ils sont manquants. Lorsqu'il est réglé sur "Matériel", il utilise uniquement le décalage reçu par les instruments (ce qui peut causer un manque de données si les instruments n'envoient pas le bon décalage). Lorsqu'il est réglé sur "Manuel" seul le décalage défini ci-dessous est utilisé :
-
Tirant d'eau : Saisir le Tirant d'eau valeur qui correspond à la hauteur d'immersion de la quille (distance d'immersion de la quille par rapport au niveau de la surface de l'eau). La valeur de la position de la sonde est toujours positive.
-
Profondeur sonde : Saisir la hauteur d'immersion des capteurs de sonde (distance d'immersion de la sonde par rapport au niveau de la surface de l'eau). La valeur de la position de la sonde est toujours positive
-
Référence du curseur Radar : lorsque l'information du curseur Radar est transmise dans la phrase NMEA 183, sentence RSD, ce paramètre permet d'ajuster si l'angle du Radar reçu est orienté "North Up" ("Vrai") ou Head Up ("Relative").
-
Calcul du Vent Réel et VMG : lorsque cette option est sélectionnée à "Surface", le cap surface et la vitesse de surface seront utilisées pour calculer la valeur du Vent alors que si vous choisissez "Ground", le calcul du vent vrai utilisera les valeurs de COG et du SOG. Nous vous conseillons d'utiliser "Ground" si vous ne recevez que les données de Vent apparent et que vous n'utilisez pas les instruments connectés fournissant les données de Cap et de vent.
-
Autoriser le mode Estime : permet à TIMEZERO d'activer le "Mode estime" de route en cas de défaillance du GPS. Pour plus d'informations reportez-vous au chapitre "Le mode estime".
-
CCRP : Le CCRP des paramètres (Point de Référence Commun Cohérent) vous permet de définir des compensations pour les GPS, Radar, et transducteurs (capteurs de la sonde). TIMEZERO utilise ces informations principalement pour l'alignement de la superposition radar sur la carte. Comme indiqué par les règlements de l'OMI, le CCRP est l'emplacement à l'icône du navire, à laquelle toutes les mesures horizontales, telles que la fourchette cible, portant, bien sûr par rapport / vitesse, point d'approche le plus proche, ou le temps de point de rapprochement sont référencés. Habituellement, c'est la position de la timonerie sur le bateau. Lors de la saisie de tous les paramètres (pour CCRP, GPS, Radar, ...) n'oubliez pas que les positions longitudinales sont toujours positives (de proue à la poupe), tandis que la position latérale est négatif pour Bâbord et positif pour tribord (0 est le milieu du bateau).
-
Réservoir et Moteur : Dans ce cas vous pouvez cliquer sur ce bouton pour configurer manuellement les "Nicknames" des réservoirs et si vous souhaitez qu'ils soient pris en compte pour le calcul du carburant. TIMEZERO est capable de prendre en compte jusqu'à 4 réservoirs. Chaque réservoir doit disposer d'un numéro d'instance différent. Le logiciel se charge de trier tous les capteurs du réservoir par numéro d'instance croissant. Pour les réservoirs qui signalent un type de carburant (dans l'exemple ci-dessous :"Fuel"), vous pouvez choisir s'ils sont utilisés pour le calcul du carburant dans TIMEZERO :
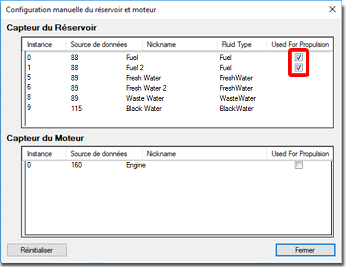
- Remarque : cette option n'apparaît et n'est disponible que si vous disposez d'une connexion NMEA2000.
-
Calibration du compas satellite Furuno : Appuyez sur ce bouton pour ouvrir une fenêtre qui permet de calibrer le compas satellite Furuno SC30, SC33 et SCX20. Vous pouvez visualiser et régler le décalage du cap, du tangage et du roulis. Notez que la calibration ne fonctionne que lorsque le compas est connecté via le l'Actisense NGT1-USB (NMEA2000) et lorsque la sortie du NMEA2000 a été configurée sur la dernière page de l'assistant de connexion.
-
Configuration des instruments graphiques : Permet de saisir les différents Min/Max utilisés pour les "Jauges NavData".
-
Atténuation COG & SOG : ce réglage est à utiliser lorsque les GPS envoie des valeurs de COG peu fiable (un COG qui varie constamment peu stable). L'augmentation de cette valeur augmente le temps de calcul de la moyenne COG/SOG (par contre il diminue le temps de réponse).
-
Atténuation de la vitesse/direction du vent : Ce paramètre permet de lisser les données de vent. L'augmentation de cette valeur augmentera le temps de moyennage du vent (mais diminuera le temps de réponse).
-
Atténuation de la vitesse du bateau : Ce paramètre permet de lisser les données de vitesse. L'augmentation de cette valeur augmente le temps de calcul de la moyenne de la vitesse (mais diminue le temps de réponse). L'augmentation de ce paramètre permet généralement d'obtenir un temps d'ETA stable.
-
Décalage de la vitesse et de la direction du vent : Permet de décaler la direction du vent en ajoutant ou en soustrayant une valeur d'angle et en augmentant ou en diminuant la vitesse du pourcentage choisi.
-
Radiogoniomètre VHF
-
Niveau de signal minimal (%) : Ajustez le seuil requis pour que les lignes de relèvement s'affichent sur la carte.
-
Expiration des lignes de relèvement : Ajustez la durée après laquelle les lignes de relèvement disparaîtront de la carte s'ils ne sont pas continuellement mis à jour.
-
Couleur des lignes de relèvement : Définissez la couleur des lignes de relèvement sur la carte (notez que les relèvements en alarme seront toujours affichés en rouge).
-
-
Nombre de moniteurs : Permet à l'utilisateur d'utiliser deux ou trois écrans avec TIMEZERO. Ce paramètre ne sera disponible que si (au moins) deux écrans en mode étendu sont détectés. Lorsque ce paramètre est disponible, TIMEZERO placera le deuxième et le troisième écran à droite de l'écran principal. S'il n'y a pas d'écran disponible à droite de l'écran principal (ou s'il n'y a pas assez lorsque vous sélectionnez 3 écrans), TIMEZERO utilisera l'écran situé à gauche de l'écran principal. Il est généralement recommandé de définir comme écran principal de Windows l'écran le plus à gauche.
-
Réinitialiser les positions des boîtes de dialogue : Appuyez sur ce bouton pour réinitialiser la position de toutes les boîtes de dialogue (fenêtres) à leur emplacement par défaut. Cela peut être utile si une boîte de dialogue (telle que la fenêtre de propriétés) a été glissée sur un écran qui a été déconnecté.
-
Configuration SeaLevel 110E/120E : cliquez sur ce bouton pour configurer l'adresse IP du SeaLevel Network IO. Reportez-vous au chapitre SeaLevel Network IO pour plus d'informations.
-
Options avancées : Ces paramètres ne doivent pas être ajustés, à moins que le support technique ne l'indique.