Fixed & Dynamic Position
TimeZero can operate in two positioning modes: fixed (manual fixed position are setup during installation) or dynamic (a GPS and Heading sensor are used to continually update the position and orientation).
Fixed Position
This is the default mode of the software. In that mode, fixed positions are used for all the sensors and for the default reference position. This means that all the sensors are mounted on land or on a fixed platform and that their position and orientation never change.

Installations that would use the fixed position mode are:
-
Fixed Oil Platform (with legs)
-
Dam
-
Power Plant
-
Refinery
Dynamic Position
In that mode, all the sensors and default reference position are relative to a live GPS and Heading sensor. This means that when the GPS moves, all sensors move in the same direction relative to the GPS position. Heading is also used to automatically adjust the orientation of the sensors (Radar and Camera). Installations that would use the dynamic position mode are:
-
Oil Platform loosely anchored on the seabed (drifting)
-
Fish Farm Barge
-
Mobile Platform such as car or trailer
In order to change the software from fix position to dynamic position, select "Options" under the button located on the upper left corner of the screen. Select "Initial Setup", click on the "Advanced Settings" button and select "Enable Dynamic Position & Orientation":
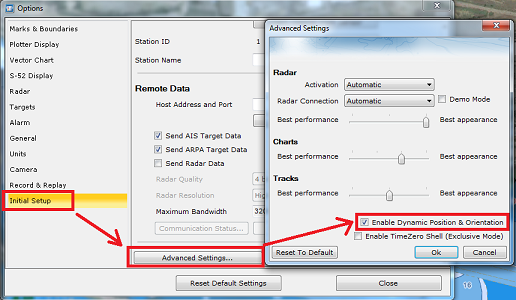
IMPORTANT: You have to restart the software to validate this change.
Once the software is in dynamic position and orientation mode, the sensors are referenced using offsets (longitudinal and lateral offset):

All the sensors and the default reference position are referenced from top to bottom (origin at the top) and from side to side (origin at the middle). Keep in mind that what defines the "top" of the platform is where the Heading sensor is pointing at. You should align the radar and camera "front" in the same direction that the heading sensor (usually a marker on the Heading Sensor and radar indicates the "bow" direction or the front of the sensor). The easiest is to align all sensors with the top of the platform:
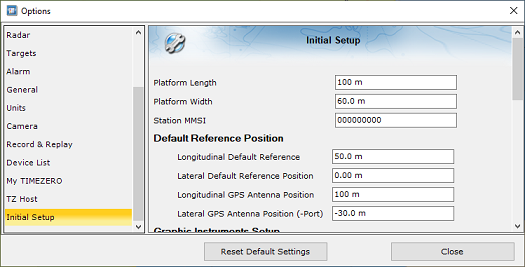
In the example below, the black square represents a platform measuring 60 meters wide and 100 meters long. The size of the platform needs to be entered first in TimeZero from the Initial Setup Options. Then enter the relative position of the Default Reference Position. In the example below, if the default reference position is located at the center of the platform, it would be 50 meters from the top (top to bottom always positive) and in the middle (0). If the GPS is located on the bottom left corner, its relative position would be 100 meters from the top and minus 30 meters from the middle:
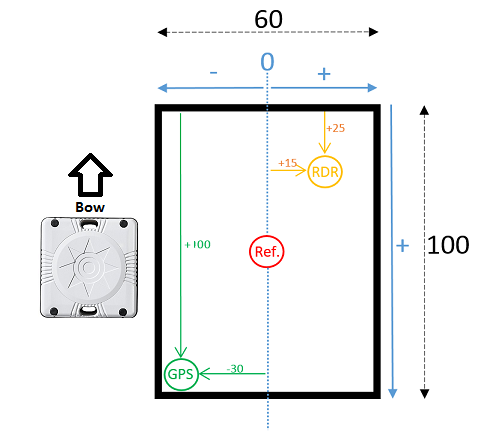
In the example above, if the radar is located in the middle of the upper right corner, its coordinate would be 25 meters from the top and 15 meters from the middle:
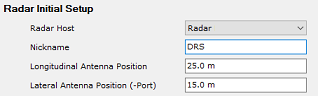
Note that the radar needs to be aligned in the same direction as the platform (same direction as the heading sensor). If there is a small variation, the "Antenna Heading Align" setting of the radar can be used to match the radar echo with the chart (use the "Radar Overlay" under the "Radar" button located in the ribbon of the Monitoring WorkSpace).
The same logic applies to the camera. Use the "Horizontal Offset" setting (available in the Camera configuration page) to align the camera with the chart.
Note: When the software is set to Dynamic Position and Orientation, a GPS and Heading sensor must be connected and configured from the Connection Wizard.