Waypoint Switching Mode
Automatic Waypoint switching:
Upon arrival at a Waypoint, a switching notification is triggered and the next Waypoint is activated automatically. Waypoint arrival parameters are determined by the Waypoint Switching Mode selected in the Routes Options:
Circle:
In this mode, the next Waypoint is automatically switched when your boat icon enters the active Waypoint’s arrival circle.
The size of the arrival circle is set in the Routes Options using the Switching Circle Radius parameter.
Cross Line (also known as "Perpendicular"):
In this mode, the next Waypoint is automatically switched when your boat crosses an imaginary line passing through the Waypoint and perpendicular to the current leg:
Circle and cross line:
This is the default selection. In this mode, the next Waypoint is automatically switched when the boat either enters the active Waypoint’s arrival circle or crosses the perpendicular line through the Waypoint.
Wheel Over Mode:
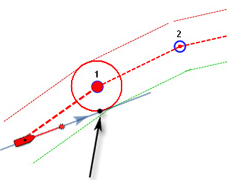
Wheel Over Mode is designed to provide smoother and more realistic turns by automatically determining the optimal point at which to switch to the next Waypoint. Instead of relying on a fixed distance or line crossing, TimeZero calculates a Wheel Over Point (WOP) based on the geometry of the route and the vessel’s maneuvering characteristics.
When Wheel Over Mode is selected, TimeZero computes a dynamic switching distance using the course change between the current and next legs, the vessel speed, and the vessel’s Rate of Turn (ROT). A dedicated "Rate of Turn" setting available in the Routes Options defines how quickly the vessel can turn, with a default value of 180 degrees per minute. Using these values, TimeZero determines when the vessel should begin the turn so that it can smoothly align with the next leg.
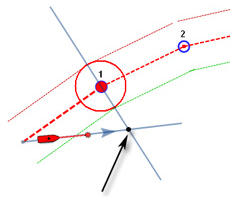
This calculated Wheel Over Point is represented visually on the chart by an arc drawn with a thin line in the same color as the route. The arc shows the expected turning path and is displayed for both the active and the planning routes.
In certain situations, the arc is displayed in red to warn the operator that the turn may not be safe or achievable at the current speed. This occurs when the Wheel Over Distance exceeds half the length of the leg, when it exceeds an absolute maximum distance of 500 meters, or when the computed turning radius is smaller than the vessel’s turning radius. These visual warnings indicate that reducing speed or adjusting the route may be necessary.
For an active route, the Wheel Over computation for the current leg uses the vessel’s real-time speed, and the arc updates dynamically as the vessel speed changes. For upcoming legs, if no speed constraint is defined, the vessel’s speed is also used; if a speed constraint has been set on a leg, that value is used instead. For a planning route, the planned leg speed is used to compute the Wheel Over Point and display the arc.
When Wheel Over Mode is enabled, Wheel Over Time and Wheel Over Distance values are available in the route details and as NavData (Route NavData). For an active route, these values are measured from the Own Ship position for the active leg and are displayed in the Active Route Detail list. For a planning route, they are measured from the previous waypoint and displayed in the Planning Route Detail list.
Note: Upon arrival at the last Waypoint, the route is automatically cancelled (deactivated).
TIPS: If you do not want TimeZero to automatically switch waypoint, or if you do not want TimeZero to automatically deactivate a "Go To", simply set the Waypoint Switching Mode to "Circle" and set the radius to 0. This will prevent TimeZero to ever reach any waypoint and switch or cancel the route automatically.
Manual Waypoint swithcing:
In some situation, you may want to directly switch to the next Waypoint. This action can be done by selecting "Skip Waypoint" from the "Route" button in the Ribbon ( or right click on the active Waypoint).