Autopilot and External Output (NMEA0183)
Select Data Output when you want TimeZero to transmit NMEA 0183 data to external devices. This is most commonly used to send navigation data to an autopilot.
Autopilots require specific navigation information from TimeZero to operate correctly. While most autopilots follow similar principles, such as steering toward a waypoint while maintaining a minimum cross-track error (XTE), implementation details may vary between manufacturers and models. For this reason, TimeZero provides several configuration options to accommodate different autopilot behaviors and requirements. Always consult the autopilot manufacturer’s documentation to confirm which NMEA sentences and data fields are required for proper operation.
Output Configuration (NMEA0183)
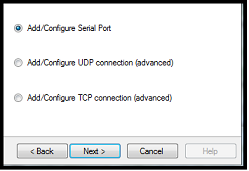
TimeZero can transmit NMEA0183 data either through a serial COM port (direct serial connection or USB-to-serial adapter) or over an Ethernet network using UDP or TCP. Select the appropriate option for your setup, then click Next to continue:
Note: UDP is typically used to broadcast NMEA data to one or more computers on the same local network (within the same broadcast domain). Use TCP when NMEA0183 data must be routed over the Internet or when the receiving device or software supports TCP only. When TimeZero is configured to output NMEA data over a TCP port that has not already been defined as an input, TimeZero will create and open the TCP port and listen for incoming connections. In this configuration, TimeZero acts as a TCP server. The remote device or application must be configured as a client and connect to TimeZero using its IP address and the port number defined on the next configuration page. If you need to receive and transmit data on the same TCP port (for example, when communicating with an NMEA multiplexer), first configure the TCP port as an input in TimeZero. Then, when setting up the TCP output, you can select the previously configured input port, allowing TimeZero to both send and receive data over the same TCP connection as a client.
The upper section of the output configuration window automatically adapts to the selected output mode (COM, UDP, or TCP). In the example below, serial (COM) output is selected, allowing you to choose a COM port and baud rate. When UDP or TCP is selected, the configuration instead prompts you to choose a network adapter and specify the corresponding UDP or TCP port:
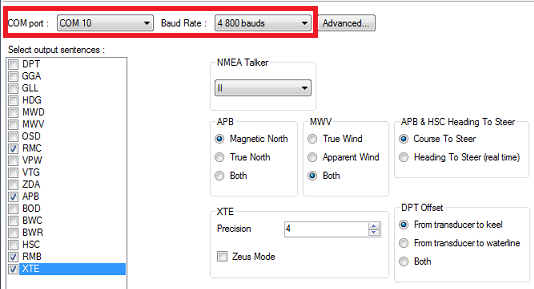
Note: If using a COM port and if the selected Port is already configured as an Input, you cannot select the baud rate (it will be locked to the same baud rate as the input).
Note: The "Advanced" button is only reserved for Technical Support. Do not adjust any advanced settings yourself.
Once the port has been configured from the top of the page, select the NMEA0183 sentences you want to output to the External Device.
Most autopilots require only the APB and XTE sentences. If your autopilot also needs position and speed information, add the RMC sentence to the output list. Refer to your autopilot’s documentation to determine exactly which NMEA sentences should be enabled.
IMPORTANT: Never send back position (RMC, GGA, GLL) to a device that already receives or outputs position. This can create a "data loop" and cause erratic behavior.
Note: When switching a Waypoint, TimeZero will always send an AAM (Waypoint Arrival Alarm) sentence to the Pilot. This allows the pilot to properly detect a switching Waypoint condition and notify you. If you want to trigger a notification inside TimeZero, make sure to check "Waypoint Switching Notification" and/or "End of Route Notification" from the Alarms Options.
Press "Next" to validate the settings then "Finish" to close the Wizard.
In order to confirm a good connection in between TimeZero and your Autopilot
-
Activate a route in TimeZero (or create an Active Waypoint using the "Go To" tool)
-
Add three "Route NavData" to the NavData panel in TimeZero: "Bearing to Waypoint (BTW)", "Distance to Waypoint (DTW)" and "Cross Track Error (XTE)" (Please refer to the NavData chapter for more information)
-
Make sure that the Autopilot and TimeZero are using the same North reference (either "True" or "Magnetic"). You can adjust the North reference in TimeZero by adjusting the "Bearing Display" setting in the Units Options
-
Configure your pilot to show a "Steering Page" displaying at minimum the corresponding information:
-
-
Distance to Waypoint (usually labeled as "DTW" or "RNG" or "DIST")
-
Bearing to Waypoint (usually labeled "CST" or "BRG" or "Bearing" or "BTW")
-
Cross Track Error (usually labeled "XTE")
-

-
Confirm that the information displayed in TimeZero and on the pilot matches
If no information appears on the Autopilot ("--" for example), or if the pilot is not steering properly, check the Autopilot Troubleshooting chapter.
Advanced Output Settings:
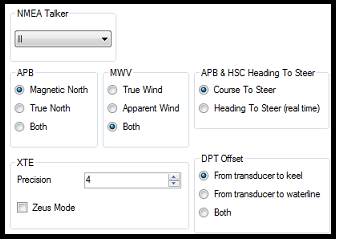
NMEA Talker:
This setting changes the NMEA talker used in the NMEA sentence generated by TimeZero. The default is set to "II" ("integrated instruments"). Some older pilots or external displays might not recognize the "II" talker. In this case, try to change it to "GP".
APB:
This setting defines the North Reference that will be used inside the APB sentence for the Bearing to Waypoint (or CTS). Usually, if the Autopilots is connected to a Magnetic Heading sensor, you will use "Magnetic North". If the Autopilot is connected to a True Heading Sensor (such as a Satellite Compass), you will use "True North". If set to "Both", the APB sentences will alternatively use Magnetic and True North. If you choose either Magnetic or True North, it is usually recommended to set TimeZero with the same reference. You can adjust the North reference in TimeZero by adjusting the "Bearing Display" setting in the Units Options
MWV:
This setting defines the Wind Reference that will be used inside the MWV sentence. If set to "Both" the MWV sentence will alternatively use Apparent Wind and True Wind (angle & speed).
APB & HSC Heading to Steer:
The APB NMEA 0183 sentence contains two bearing references: Course to Steer and Heading to Steer. When Course to Steer is selected in TimeZero, the Heading to Steer field in the APB and HSC sentences is set to the same value (a direct copy of the Course to Steer).
When Heading to Steer (real time) is selected, TimeZero applies the drift vector to the Course to Steer to calculate a corrected Heading to Steer that accounts for real-time current effects. This computed value is then used in the Heading to Steer field of the APB and HSC sentences.
For Heading to Steer (real time) to be accurate, a high-precision heading source (such as a satellite compass) is required. For most applications, it is recommended to leave this setting set to Course to Steer.
XTE:
The "Precision" settings indicate the number of digits used for the Cross Track field used in the NMEA sentences. Only decrease the precision if you have an old Autopilot that has trouble adjusting to high precision XTE.
The ZEUS mode is intended for use only with the ZEUS Mercury Autopilot. This option modifies TimeZero’s end-of-route behavior. When ZEUS mode is enabled, all XTE (Cross Track Error) fields are set to NULL values (,,) upon reaching the end of a route. For all other autopilots, this option should remain unchecked..
DPT (Depth) Offset:
Indicates the type of transducer offset used in the NMEA Depth output. Make sure that the "Transducer Draft" and "Keel Draft" settings are properly setup in TimeZero from the Initial Setup Options.
TTM Bearing and Course:
Used to output the TTM bearing relative to own ship heading (relative) or relative to North.
To delete an output port:
-
Open the Connection Wizard
-
Select "Data Source" and press "Next"
-
Press "Next"
-
On the Master selection page. press the "Delete" button in front of the output port you want to delete
![]()
-
Press "Next" and "Finish" to close the Connection Wizard
Autopilot Output (NMEA2000)
When an Actisense NGT1-USB or NGX1-USB is connected to your computer and already setup as an input (NMEA2000 input), the last page of the Connection Wizard allows you to enable or disable the "NMEA2000 Pilot Output" (checked by default):
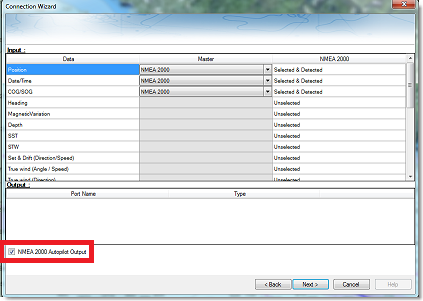
When "NMEA2000 Pilot Output" is checked, the following PGNs are automatically sent while a route is activated:
-
PGN 129283 - Cross Track Error
-
PGN 129284 - Navigation Data
-
PGN 129285 - Navigation Route/WPT Information (used to transmit the name of the destination waypoint)
Note: TimeZero does not output any other data on the NMEA2000 bus. It can just outputs the pilot PGNs listed above.