Sondeur multifaisceaux DFF-3D
TZ Professional doit être configuré avec le "Module DFF-3D" avant de procéder aux réglages du sondeur DFF-3D de Furuno.
TIMEZERO peut être connecté à un réseau NavNet qui dispose d'un équipement MFD (TZtouch/TZtouch2/TZtouch3) et d'un DFF-3D ou d'un TIMEZERO directement connecté directement au DFF-3D (sans aucune présence de MFD sur le réseau).
Lorsqu'il y a un MFD sur le réseau, tous les réglages initiaux du DFF-3Ddoivent être effectués depuis l'équipement MFD en suivant pas à pas les instructions décrites dans manuel d'installation Furuno. Une fois la configuration effectuée sur le MFD, vous pouvez démarrer TIMEZERO et configurer la connexion NavNet à partir de l'assistant de connexion (pour recevoir la position, le cap, la profondeur, etc.) manuellement ou automatiquement.
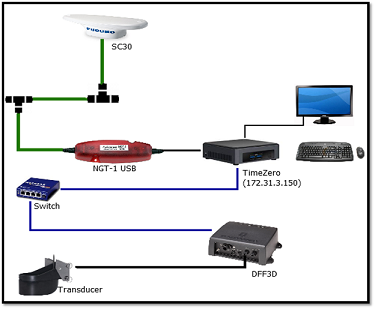
Lorsqu'il n'y a pas de MFD sur le réseau, vous devez avoir configuré au minimum une position et un cap à fréquence rapide (10 fois par seconde) dans TIMEZERO pour pouvoir géo-référencer les Informations DFF-3D. Le capteur de mouvement interne du transducteur DFF-3D peut être utilisé pour la compensation de mouvement, mais il est fortement recommandé d'utiliser l'équipement de Furuno SC30 (Compas Satellite) connecté à l'ordinateur via NMEA2000 (à l'aide de l'adaptateur USB Actisense NGT-1). Le SC30 fournie une donnée de positionnement GPS, un Cap à grande vitesse et une meilleure information de mouvement que le capteur interne du DFF-3D. Pour connecter le DFF-3D à l'ordinateur d'utiliser un commutateur Switch (surtout si le DFF-3D est le seul équipement Ethernet) :
Remarque : Lorsqu'il y a un MFD (TZtouch/TZtouch2/TZtouch3) sur le réseau, les instruments de positionnement (GPS) et de cap (compas) sont directement connectés au MFD (le compas satellite Furuno est toujours recommandé). Dans ce cas, il n'est pas nécessaire de connecter le compas satellite directement à TIMEZERO.
Configuration de l'ordinateur
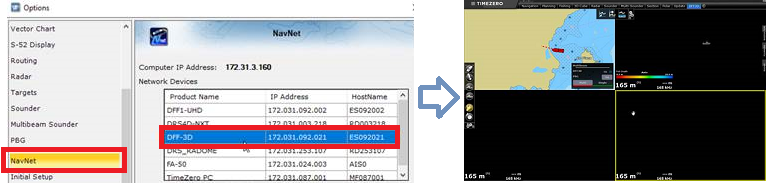
Le DFF-3D (et le MFD si présent) se connecte(nt) au PC via une connexion Ethernet (100Base-T). Tous les équipements Ethernet Furuno (y compris les sondeurs Ethernet) opèrent sur le même réseau locale 172.31. x. x. x / 255.255.0.0. Vous devrez configurer l'adresse IP de votre ordinateur pour qu'elle corresponde à ce réseau. Nous vous recommandons d'utiliser l'adresse IP suivante pour votre ordinateur : 172.31.3.150 et pour le masque de sous réseau l'adresse suivante : 255.255.0.0.
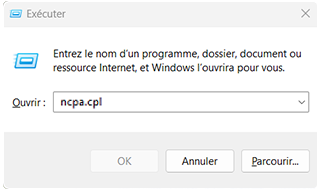
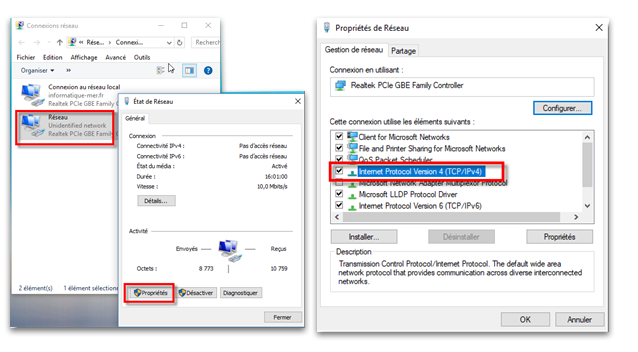
Vous devez ouvrir le panneau de configuration de Windows pour accéder aux "Connexions réseau" de votre ordinateur et définir l'adresse IP. Sous Windows 10/11 utilisez le raccourci clavier en combinant les touches clavier "Touche Windows” + R" pour ouvrir la boîte de dialogue "Exécuter". Tapez "ncpa.cpl" et cliquez sur "OK".
Double-cliquez sur l'adaptateur réseau connecté au DFF-3D (généralement "Connexion au réseau local").
Remarque : Si vous disposez de plusieurs connexions cartes réseau (cartes Ethernet multiples) et si vous ne savez pas lesquelles sont connectées au DFF-3D, vous pouvez temporairement débrancher le câble Ethernet connecté au DFF-3D de l'ordinateur et voir quelle icône affichera une croix rouge. Ceci indiquera le réseau local qui a été déconnecté de l'ordinateur, et donc celui qui doit être configuré.
Sélectionnez "Propriétés" dans la fenêtre "État de la connexion au réseau local".
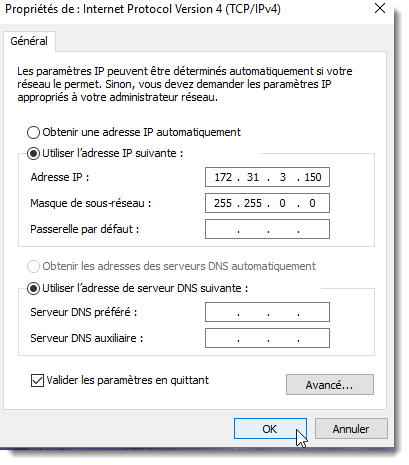
Double-cliquez sur "Internet Protocol Version 4 (TCP/IPv4)". Utilisez l'adresse IP fixe 172.31.3.150 avec un masque de sous-réseau de 255.255.0.0 :
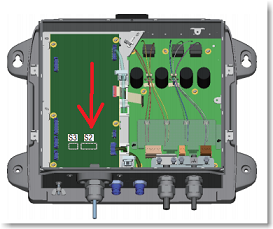
Si l'équipement DFF-3Dest directement connecté à l'ordinateur, assurez-vous que le DFF-3D est réglé sur le mode Adresse IP fixe. Enlevez le capot du DFF-3D et vérifiez que tous les commutateurs DIP "S2" et "S3" sont en position OFF :
Connectez le DFF-3Dà l'ordinateur directement ou de préférence, via un HUB/Switch.
Remarque : Vous pouvez envoyer un "Ping" sur l'adresse DFF-3D depuis votre ordinateur pour vous assurer que la connexion entre l'ordinateur et le DFF-3D est correcte. L'adresse du DFF-3D à utiliser pour le "Ping" est 172.31.92.21. Pour plus d'informations sur le ping d'un périphérique Ethernet, reportez-vous au chapitre Comment envoyer un Ping sur une adresse.
Configuration dans TIMEZERO
Démarrez TIMEZERO en mode Navigation, sélectionnez les options "Sondeur multifaisceaux".
Configuration de la sonde DFF-3D
Faites défiler vers le bas à l'intérieur des "Options" du "sondeur multifaisceaux" de TIMEZERO jusqu'au paragraphe "Configuration" :
-
Profondeur de la sonde : pour régler l'immersion de la sonde, distance située entre le niveau de la mer et la position de la sonde. Ce chiffre devrait toujours être positif.
-
Eau de mer : cocher la case si vous travaillez en mer (vitesse du son ajustée pour les mesures de distances)
-
Configuration Sonde : cliquer sur le bouton pour régler la position du centre de gravité ("GC") du GPS et du capteur de mouvement (Pitch/Roll/Heave) par rapport à la sonde (TD) à l'aide du système de coordonnées ci-dessous :
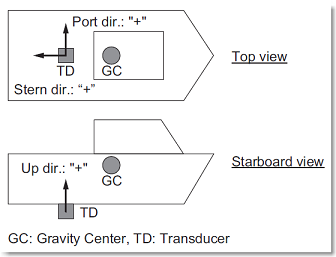
- Sélectionnez "Montage inversé de la sonde" si l'équipement DFF-3D a été installé dans la mauvaise direction (inversée).
- Entrez la distance (sur l'axe avant/arrière) entre la sonde et le centre de gravité du navire dans le champ "Position Avant/Arrière de la sonde". Si le centre de gravité est "devant" la sonde (comme sur l'image ci-dessus), entrez une valeur négative.
- Entrez la distance (sur l'axe descendant / ascendant) entre la sonde et le centre de gravité du navire dans le champ "Position Haut/Bas de la sonde". Pour une position ascendante du centre de gravité (comme sur l'image ci-dessus), entrez une valeur positive.
- Entrez la distance (sur l'axe Tribord / Bâbord) entre la sonde et le centre de gravité du navire dans le champ "Position Bâbord/ Tribord de la sonde". Pour l'emplacement du Bâbord du centre de gravité, entrez une valeur positive.
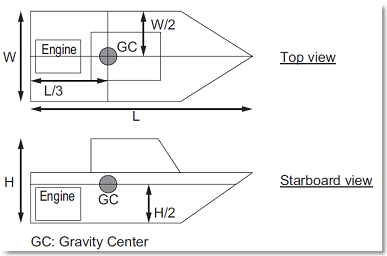
CONSEIL : Si l'emplacement du centre de gravité est inconnu, utilisez l'approximation suivante pour le localiser :
- Entrez l'emplacement du positionneur GPS en utilisant les mêmes règles que celles utilisées pour positionner le centre de gravité par rapport à la sonde.
- Sélectionnez "Interne" ou "SC" pour la source du "Capteur de mouvement" ("Off" n'est pas recommandé).
- Lorsqu'il est réglé sur "Interne", c'est le capteur de mouvement intégré au sondeur DFF-3D qui est utilisé. Dans ce cas, il n'est pas nécessaire d'entrer la position du capteur de mouvement (car son emplacement est identique à celui de la sonde !).
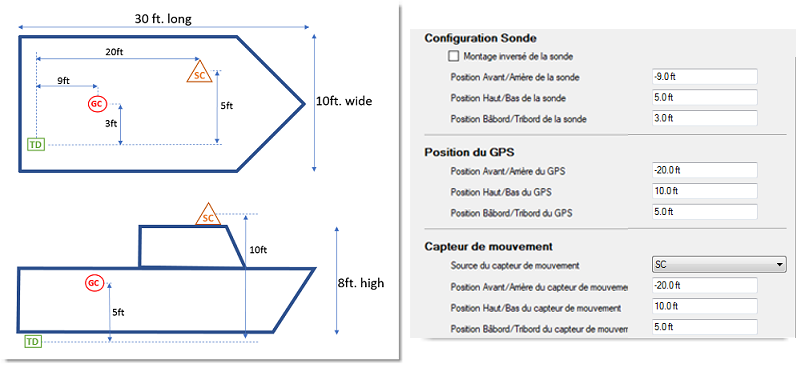
- Sélectionnez "SC" lorsqu'un SC30 est connecté à TIMEZERO (de préférence avec NMEA2000). Dans ce cas, entrez la position SC30 (saisissez la position relative de la sonde à l'emplacement du SC30) en utilisant les mêmes règles que celles utilisées pour la position de la sonde par rapport au GPS. Si votre SC30 est également votre principal positionneur GPS, vous pouvez entrer le même décalage que pour la position du GPS.
Remarque : si vous utilisez un compas satellite Furuno pour la position en même temps que la compensation de mouvement, il suffit de définir les mêmes décalages sur le GPS et le capteur de mouvement.
IMPORTANT : Pour obtenir les meilleures performances de compensation de mouvement, il est fortement recommandé d'utiliser un SC33, SC30 ou SCx20 connecté à TIMEZERO via NMEA2000 (à l'aide de l'adaptateur Actisense NGT1 USB vers NMEA2000).
Ci-dessous un exemple illustrant le décalage correct (le SC30 est utilisé pour le GPS et le capteur de mouvement) :
-
S'il n'y a pas de MFD sur le réseau, réglez le délai du capteur (à l'intérieur de la fenêtre "configuration de la sonde") selon les cas suivants (s'il y a un MFD sur le réseau, référez-vous au guide d'installation MFD pour les valeurs appropriées du délai du capteur)
IMPORTANT : si les instruments sont connectés au MFD, référez-vous aux instructions du MFD pour appliquer les valeurs de décalage du délai appropriées. Appliquer les valeurs ci-dessous SEULEMENT s'il n'y a pas de MFD sur le réseau et si les capteurs sont directement connectés à TIMEZERO.
Capteur de mouvement (avec utilisation du SC30 directement connecté à TIMEZERO) :
Réglez ces paramètres uniquement si "Source du capteur de mouvement" est réglé sur "SC" (pas "Interne").
- 250ms si le SC30 est connecté via NMEA2000 à l'aide de l'adaptateur USB NGT1 d'Actisense USB vers NMEA2000.
- 280ms si le SC30 est connecté via NMEA0183 (Port COM) à 38400 bps avec un intervalle de répétition de 10Hz minimum.
- 380ms si le SC30 est connecté via NMEA0183 (Port COM) à 4800 bps avec un intervalle de répétition de 10Hz minimum.
Compas (lorsque le compas est directement connecté à TIMEZERO) :
Lorsque le SC30 directement connecté sur TIMEZERO est sélectionné en tant que source de position :
- 250ms si le SC30 est connecté via NMEA2000 à l'aide de l'adaptateur USB NGT1 d'Actisense USB vers NMEA2000.
- 280ms si le SC30 est connecté via NMEA0183 (Port COM) à 38400 bps avec un intervalle de répétition de 10Hz minimum.
- 380ms si le SC30 est connecté via NMEA0183 (Port COM) à 4800 bps avec un intervalle de répétition de 10Hz minimum.
Lorsque vous utilisez un compas PG700 ou un compas tiers directement connecté sur TIMEZERO :
- 290ms si le capteur de cap est connecté via NMEA2000 à l'aide de l'adaptateur USB NGT1 d'Actisense USB vers NMEA2000.
- 320ms si le capteur de cap est connecté via NMEA0183 (Port COM) à 38400 bps avec un intervalle de répétition de 10Hz minimum.
- 420ms si le capteur de cap est connecté via NMEA0183 (Port COM) à 4800 bps avec un intervalle de répétition de 10Hz minimum.
Positionneur (lorsque le positionneur GPS est directement connecté à TIMEZERO :
Si vous utilisez un SC30 directement connecté sur TIMEZERO comme source de position :
- 250ms si le SC30 est connecté via NMEA2000 à l'aide de l'adaptateur USB NGT1 d'Actisense USB vers NMEA2000.
- 280ms si le SC30 est connecté via NMEA0183 (Port COM) à 38400 bps avec un intervalle de répétition de 10Hz minimum.
- 380ms si le SC30 est connecté via NMEA0183 (Port COM) à 4800 bps avec un intervalle de répétition de 10Hz minimum.
Si vous utilisez un GP330B ou un GPS tiers directement connecté sur TIMEZERO :
- 290ms si le GPS est connecté via NMEA2000 à l'aide de l'adaptateur Actisense NGT1 USB vers NMEA2000.
- 320ms si le GPS est connecté via NMEA0183 (Port COM) à 38400 bps avec un intervalle de répétition de 10Hz minimum.
- 420ms si le GPS est connecté via NMEA0183 (Port COM) à 4800 bps avec un intervalle de répétition de 10Hz minimum.
-
Puissance de transmission : Il est recommandé de laisser la puissance de transmission en position Auto. Si vous utilisez le DFF-3Dsur 100 mètres, il est recommandé de le régler sur Maximum (10).
Assistant de connexion
Dans un premier temps vérifiez que TIMEZERO est correctement configuré pour recevoir les données de position, de cap et éventuellement de mouvement (lorsque le SC30 est utilisé). Si vous utilisez un SC30 connecté à l'ordinateur en utilisant NMEA2000 via l'Actisense NGT-1 (configuration recommandée), assurez-vous d'avoir configuré une connexion NMEA2000 à partir de l'Assistant de connexion.
Notez que les données de profondeur sont envoyées à TZ Professional via la connexion Ethernet sur le port NavNet NMEA. De plus, si le DFF-3D est directement connecté au PC (pas de matériel MFD Furuno disponible sur le réseau, tel qu'un NavNet TZT ou un NavNet TZT2), TIMEZERO doit être réglé pour renvoyer les informations au DFF-3D.
Suivez les étapes décrites ci-dessous pour configurer correctement le port NavNet et renvoyer les données au DFF-3D (si aucun MFD n'a été détecté sur le réseau) :
- Sélectionnez l'assistant de connexion qui se trouve dans le menu du bouton TIMEZERO.
- Sélectionnez "Configuration manuelle du port" dans l'assistant de connexion.
- Sélectionnez "Ajouter/Configurer la connexion NavNet" et cliquez sur "NMEA & AIS".
- Assurez-vous que la donnée "Profondeur" est sélectionnée sur le port "NavNet NMEA".
- Cliquez sur "Suivant".
- Dans l'écran suivant, cochez "Sortie DFF-3D" SEULEMENT s'il n'y a pas de MFD Furuno sur le réseau. Ceci permet d'activer la sortie de cap (et de mouvement si un capteur de mouvement externe tel que SC30 est utilisé) vers le DFF3D. Lorsqu'un MFD est présent sur le réseau, n'activez pas cette sortie car le MFD se charge d'envoyer ces données au DFF-3D.
- Cliquez sur "Terminer" pour fermer l'assistant de connexion
Diagnostic DFF-3D
Le diagnostic DFF-3D vous permet de résoudre les problèmes avec le DFF-3D et de vous assurer que TIMEZERO reçoit les données appropriées.
Après avoir configuré le DFF-3D et TIMEZERO, il est recommandé de regarder le moniteur DFF-3D:
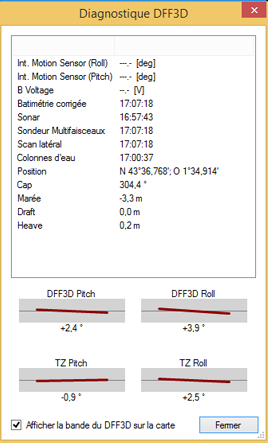
Vérifiez que toutes les données sont correctement reçues.
Vérifiez également (fortement recommandé) que la case "Afficher la bande du DFF3D sur la carte" soit temporairement cochée lorsque vous êtes à quai pour vérifier que le décalage est correctement configuré.
La sélection de cette option affiche une ligne verte qui est représentative de la bande de balayage du DFF-3D :
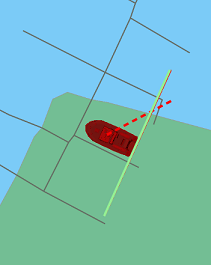
IMPORTANT : Pour que l'icône du bateau s'ajuste correctement, vous devez saisir la longueur et la largeur du bateau ainsi que la position du GPS dans les options d'installation de TIMEZERO. Notez que le système de coordonnées utilisé par TIMEZERO est différent de celui qui est utilisé dans la configuration de la sonde pour la saisie du décalage DFF-3D.
Lorsque le bateau est en mouvement, vous devez apercevoir une ligne verte (représentant la bande de balayage du DFF-3D en cours) et un tracé de lignes rouges montrant les 50 derniers balayages. Lorsque le bateau suit une ligne droite par temps calme (sans tangage) à vitesse constante, l'espace entre les lignes rouges est pratiquement égal, comme c'est montré dans l'image :
Notez qu'il est normal que la ligne verte soit en retard derrière le bateau (en raison du décalage du matériel et du temps de traitement DFF3D).
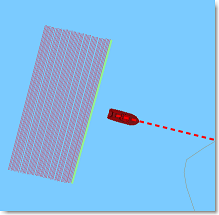
Lors d'un virage, les lignes rouges sont dessinées de la manière suivante (figure ci-dessous) :
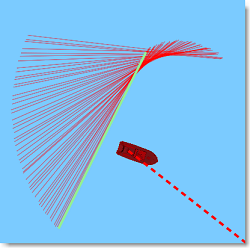
Si les lignes rouges ne sont pas uniformément espacées, il se peut que la fréquence de rafraîchissement du cap soit inférieure à 10Hz.
Calibration des données Bathymétriques
Décalage de roulis
Se référer à la carte ou aux connaissances de localisation pour identifier l'endroit du test de décalage du roulis. Idéalement repérer une zone plate entre 20 et 40m de profondeur (il est difficile d'obtenir une lecture précise si la profondeur est inférieure à 10m). Activez l'enregistrement PBG, affichez les points PBG (ils aident à visualiser où le DFF-3D génère réellement les points de profondeur), faites avancer le navire le long d'une ligne droite dans une direction. Faites tourner le navire dans la direction du port et faites un aller-retour à côté du premier passage (dans la direction exactement opposée). Si les points PBG générés par les deux balayages côte à côte indiquent la même profondeur (plat), vous n'avez pas de décalage de roulis. Cependant, si les deux balayages côte à côte créent une bosse ou un trou, vous devez introduire un décalage de roulis.
Si vous utilisez le capteur de mouvement interne du transducteur DFF-3D, vous pouvez régler le décalage de roulis à partir de la fenêtre de configuration du transducteur. CEPENDANT, si vous utilisez un compas satellite (recommandé), vous devez régler le compas satellite directement. Cela peut être fait à partir des options de la configuration initiale en cliquant sur le bouton "Calibrage" (affiché sous "Compas satellite Furuno").
Remarque : TIMEZERO doit être connecté au compas satellite en utilisant l'Actisense NGT1-USB (via NMEA2000).
Correction de la vitesse du son de l'écho
La vitesse du son dans l'eau est modifiée par la salinité et la température de l'eau. Le DFF-3D se base sur la vitesse du son pour calculer la profondeur. Une valeur incorrecte fera apparaître un fond plat avec une "bosse" ou un "trou" à travers la bande. L'exemple ci-dessous montre que le DFF-3D cartographie une "bosse" en raison d'un mauvais étalonnage de la vitesse du son :
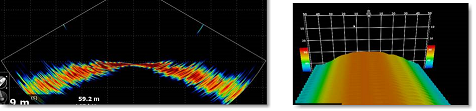
Comme il y a une plus grande distance au bord du balayage (par rapport à la distance prise directement sous le bateau), une hypothèse erronée concernant la vitesse du son dans l'eau a un impact plus important sur les bords, et c'est ce qui provoque la "bosse" observée. Notez que l'inverse peut également se produire (c'est à dire que l'on peut obtenir un "trou" au centre au lieu d'une "bosse"). Bien que le transducteur du DFF-3D dispose d'un capteur de température qui lui permet de calculer la vitesse du son, il est parfois nécessaire de définir un décalage.
Si vous constatez une "bosse" ou un "trou" dans le balayage sur une zone plate, vous devez ajuster la "Correction de la vitesse du son" dans les Options du sondeur multifaisceaux.
Pour diminuer la "bosse", le curseur doit être ajusté vers la droite (valeur positive). De même, le paramètre situé juste en dessous de "Correction basée sur la température" doit être activé (permet de modifier la vitesse du son du DFF-3D en fonction du capteur de température du sondeur). Si vous travaillez en eau salée, assurez-vous que l'option "Eau salée" est sélectionnée dans les paramètres de configuration du DFF-3D.
Réglage de la taille de la trace PBG
Les points enregistrés avec le DFF-3D sont enregistrés de la même manière qu'avec un sondeur classique simple faisceau. La seule différence est que le DFF-3D fournit de nombreux points par seconde (jusqu'à 50) sur une zone plus étendue. Cependant, TIMEZERO utilise la même extrapolation (paramètre de la trace PBG) qu'avec un sondeur classique. Si vous recueillez des points de données de profondeur avec le DFF-3D dans des zones comprises entre 10 et 30 mètres, nous vous recommandons de diminuer la "Taille de la trace PBG" dans les options PBG pour augmenter la résolution.
Dans les zones d'une profondeur supérieure à 30 mètres, la taille de trace par défaut (19) est recommandée. En effet, la distance entre les points de profondeur augmente avec la profondeur, et TIMEZERO a besoin d'une taille de trace plus grande pour "remplir l'espace" et lisser tous les points de profondeur.
Remarque : n'hésitez pas à ajuster la taille de la trace comme vous le souhaitez. L'extrapolation est appliquée en temps réel et n'affecte pas la façon dont les points sont enregistrés (elle affecte seulement la façon dont ils sont rendus à l'écran).
Résolution avancée de problèmes :
Message de "Hors tension" ou "Pas de connexion"
Si TIMEZERO affiche le message "Hors tension" ou "Pas de Connexion" dans les espaces de travail du DFF-3D (Section, Colonne d'eau ou Scan latéral) généralement c'est que le sondeur n'a pas été reconnu sur le réseau. Vérifiez l'adresse IP de l'ordinateur (assurez-vous que le masque de sous-réseau correspond à l'adresse suivante : 255.255.0.0) et que tous les câbles sont correctement branchés. Vous pouvez envoyer un Ping du matériel DFF-3D à partir de l'ordinateur pour s'assurer que la connexion entre l'ordinateur et le sondeur est correctement effectuée. L'adresse IP du DFF-3Dà interroger par Ping est : 172.31.92.21. Reportez-vous au chapitre "Comment envoyer un Ping sur une adresse" pour plus d'informations.
Pas d'image (aucun écho) affichée à l'écran
Lorsque le DFF-3D répond à l'envoi du Ping et qu'il apparaît dans la liste disponible dans les options NavNet de TIMEZERO, et qu'aucun écho n'est affiché à l'écran, la cause pouvant être due à la présence d'un coupe-feu (Firewall) configuré sur l'ordinateur ou un conflit entre plusieurs cartes réseau Ethernet :
Dans un premier temps, essayer de désactiver le pare-feu (soit le firewall de Windows ou n'importe quel pare-feu tiers installé sur l'ordinateur) puis, redémarrez le DFF-3D ainsi que TIMEZERO.
Si le problème persiste, il est possible que votre ordinateur dispose de plusieurs configurations réseau (plusieurs cartes réseau Ethernet et/ou un réseau Wi-Fi). Pour confirmer que vous êtes confronté à ce problème, vous pouvez désactiver temporairement toutes les cartes Ethernet (et adaptateurs Wifi) qui ne sont pas utilisées pour établir la connexion au DFF-3D. Si le problème est résolu et que vous n'utilisez pas les autres adaptateurs, il est recommandé de les laisser désactivés. Cependant, si vous avez besoin des autres adaptateurs (pour vous connecter à l'Internet par exemple) et que vous devez les réactiver, vous avez la possibilité de modifier manuellement la "Métrique" de toutes les connexions Réseau pour définir une priorité afin que TIMEZERO utilise la carte Ethernet appropriée.
Nous vous suggérons de régler la valeur métrique de la carte Ethernet connectée au réseau Furuno sur 10, et de régler les autres cartes sur 50, 60, etc. (la métrique de valeur inférieure correspond à la priorité la plus élevée).
Ouvrez la fenêtre des propriétés TCP/IP v4 :
Cliquez sur le bouton « Avancé… », décochez la case « Métrique automatique » et saisissez la valeur manuellement :
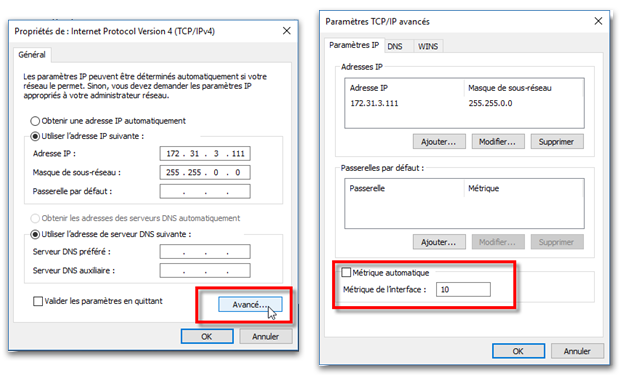
Après avoir réglé les valeurs "Métrique Automatique" du réseau vous devez redémarrer l'ordinateur.